新聞中心NEWS
December 05.2023
M PLC——中斷定長與定角
 中斷定長&定角功能常用于感應后的定位控制。如:需接觸到傳感器后需要再前進設定的距離長度 或 接觸傳感器后需要再旋轉到固定的角度。中斷定長適用于需要高精度運動控制和運動同步的各種應用領域。 |
| 摘要 |
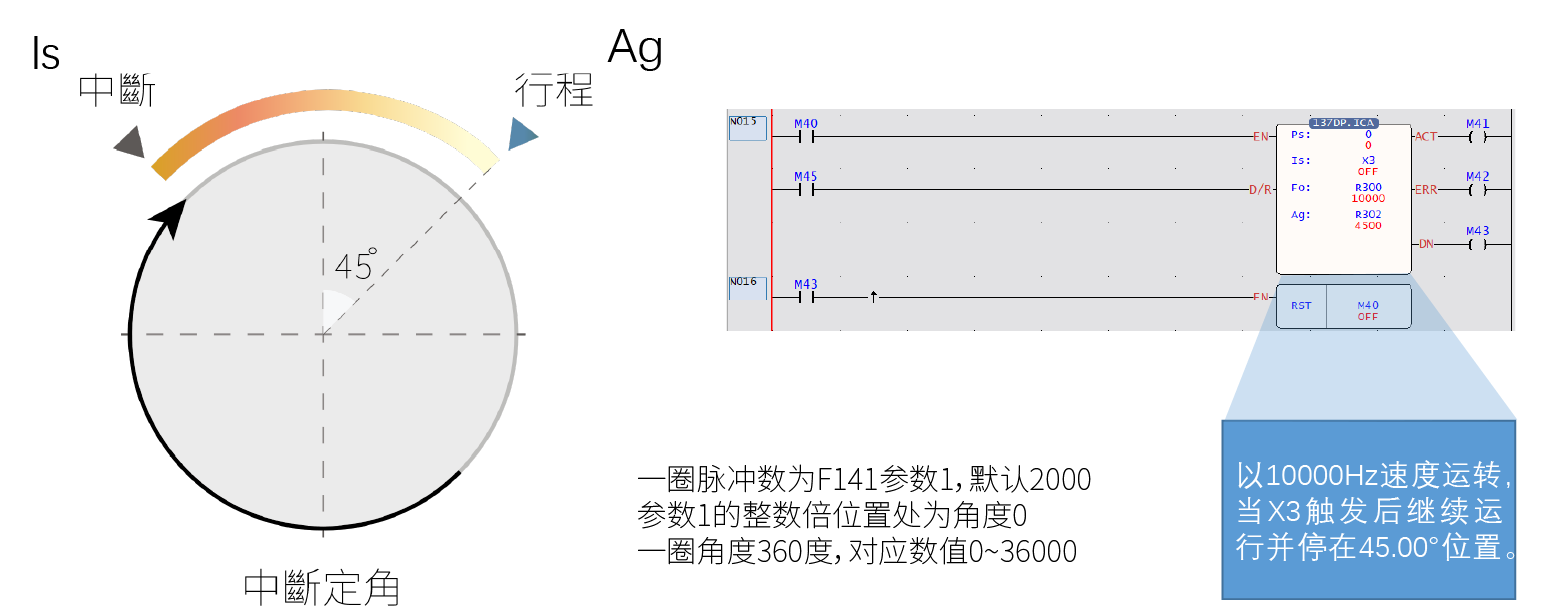
| 中斷定角功能 | ||
| 指運動軸做旋轉運動時,可以通過外部信號X點 ,來觸發PLC,當信號觸發后,運動軸停止在設定角度。 | ||
| 執行圖如下: | ||
 | ||
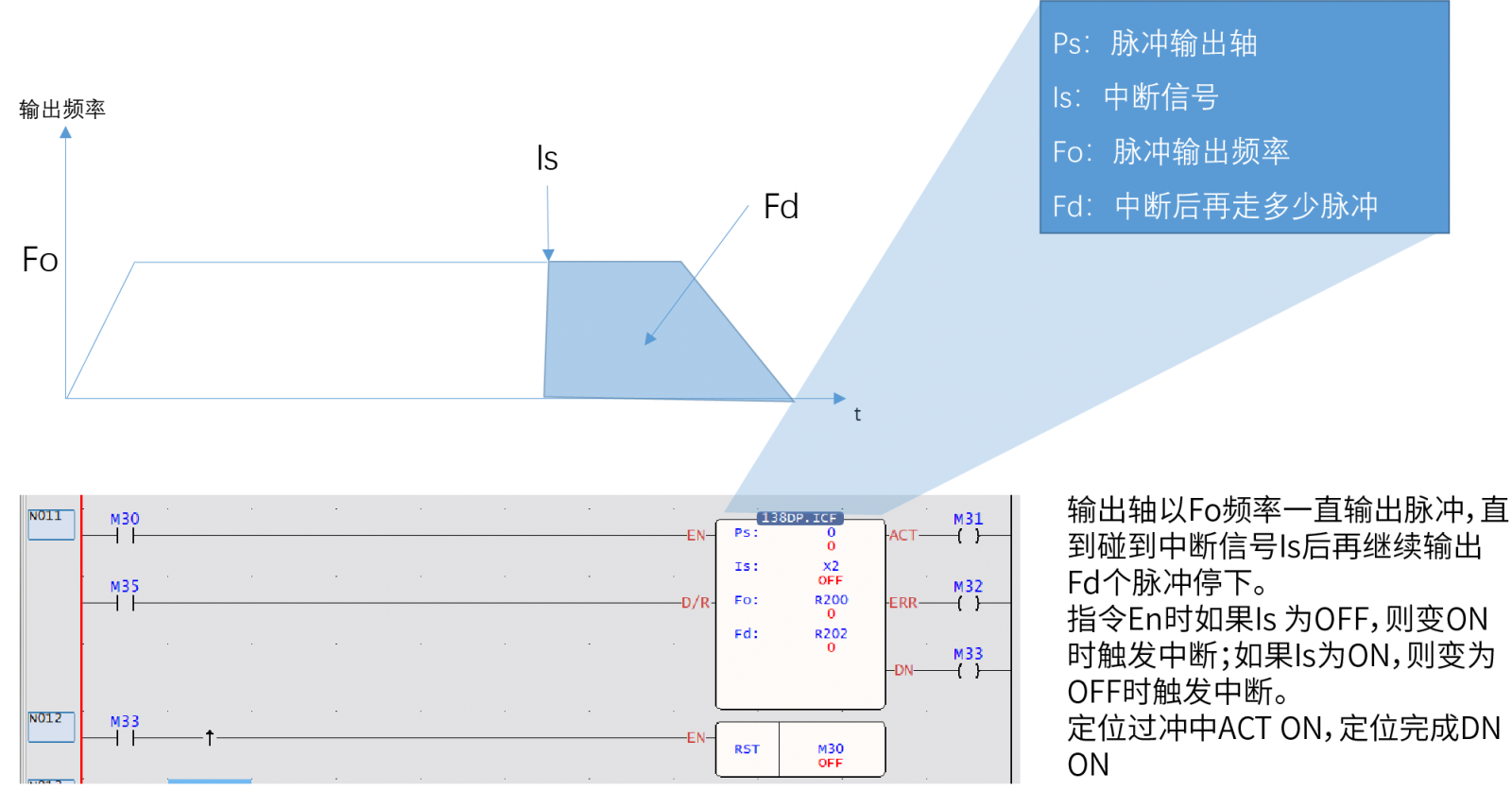
| 中斷定長功能 | ||
| 中斷定長功能,是指運動軸做旋轉運動時,可以通過外部信號X點 ,來觸發PLC,當信號觸發后,運動軸運行設定的距離后停止。 | ||
| 執行圖如下: | ||
 | ||
| 測試環境 |
| 此范例程序的配置如下: PLC型號:MA1I4-1616T; PLC軟件版本:V0.8.637; PLC OS版本:0.2.46; 伺服驅動器型號:DA6-0003R2G00S; 伺服電機型號:MA6-040R3060A06N2C; 中斷功能輸入點:X3; 控制電機軸:PS0 | ||
| 調試順序 |
| 硬件配線 | ||
| ①PLC電源、伺服電源、PLC輸入輸出點、伺服CN1控制線等配線連接; ②PLC 40pin引腳接線圖; | ||
 | ||
| ③伺服端接線圖(其他品牌伺服請查閱相關說明書); | ||
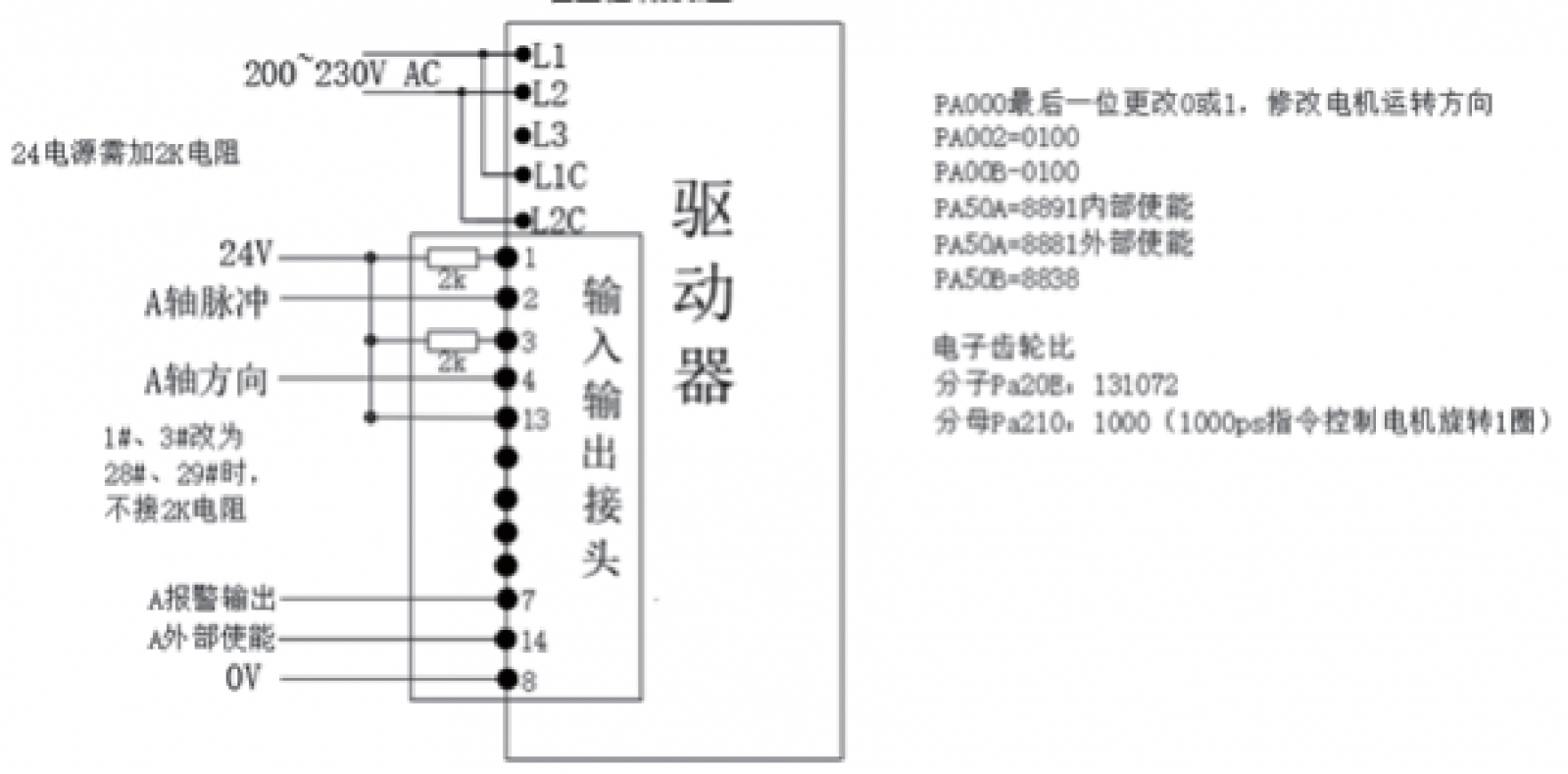 | ||
| 軟件編程 | ||
| 【LD 程序說明】 ①新建專案:雙擊軟件快捷方式-新建專案-輸入專案名稱-選擇PLC型號- 選擇程序語言為階梯圖-點擊確定 | ||
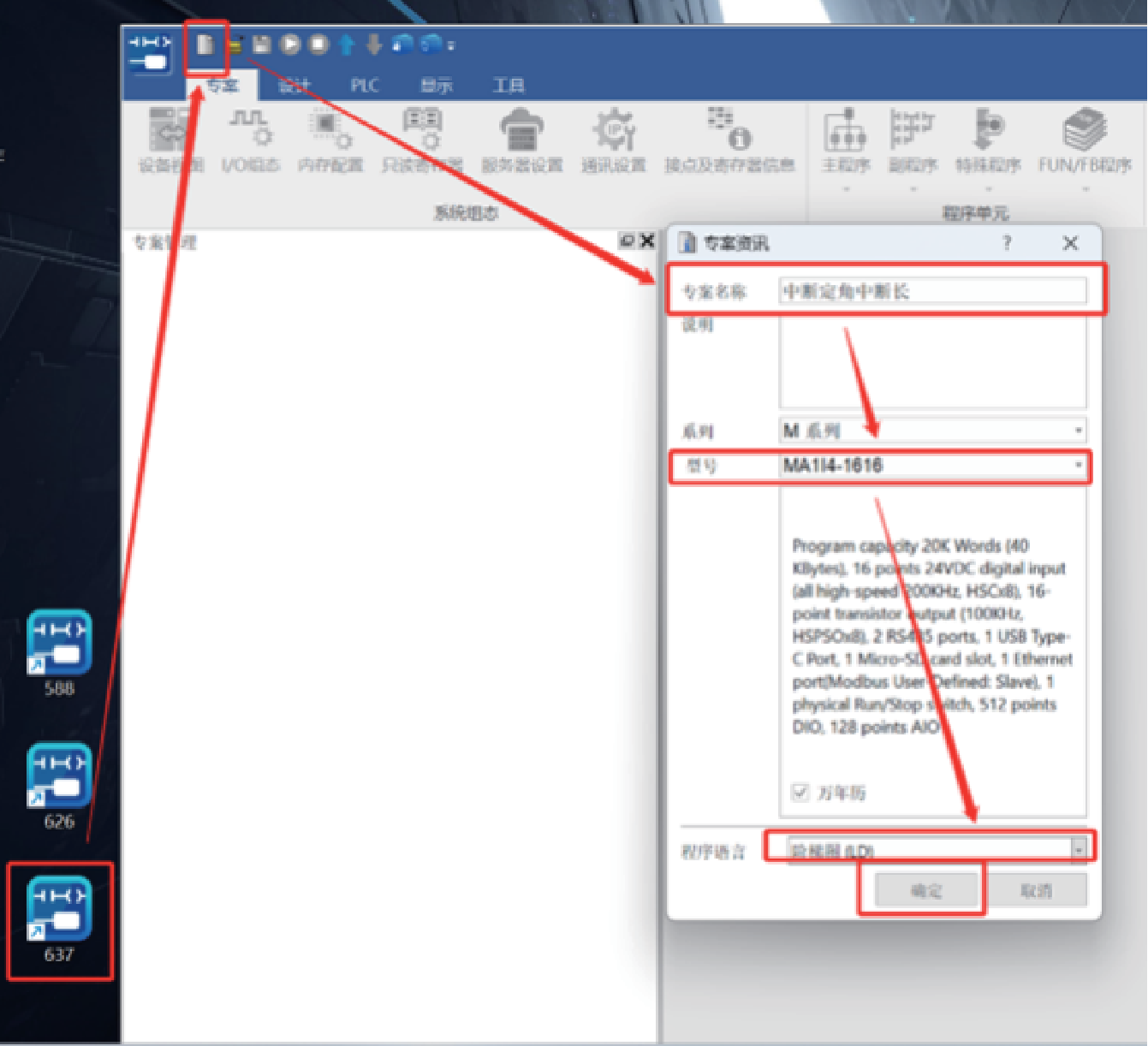 | ||
| ②配置組態:專案-I/O組態-輸出設定-PSo0 Y0=脈沖Y1=方向-點 擊確認 | ||
 | ||
| ③新建伺服參數指令:起始脈波置位141 EN信號-按大寫“F”輸入 141指令點擊確認 | ||
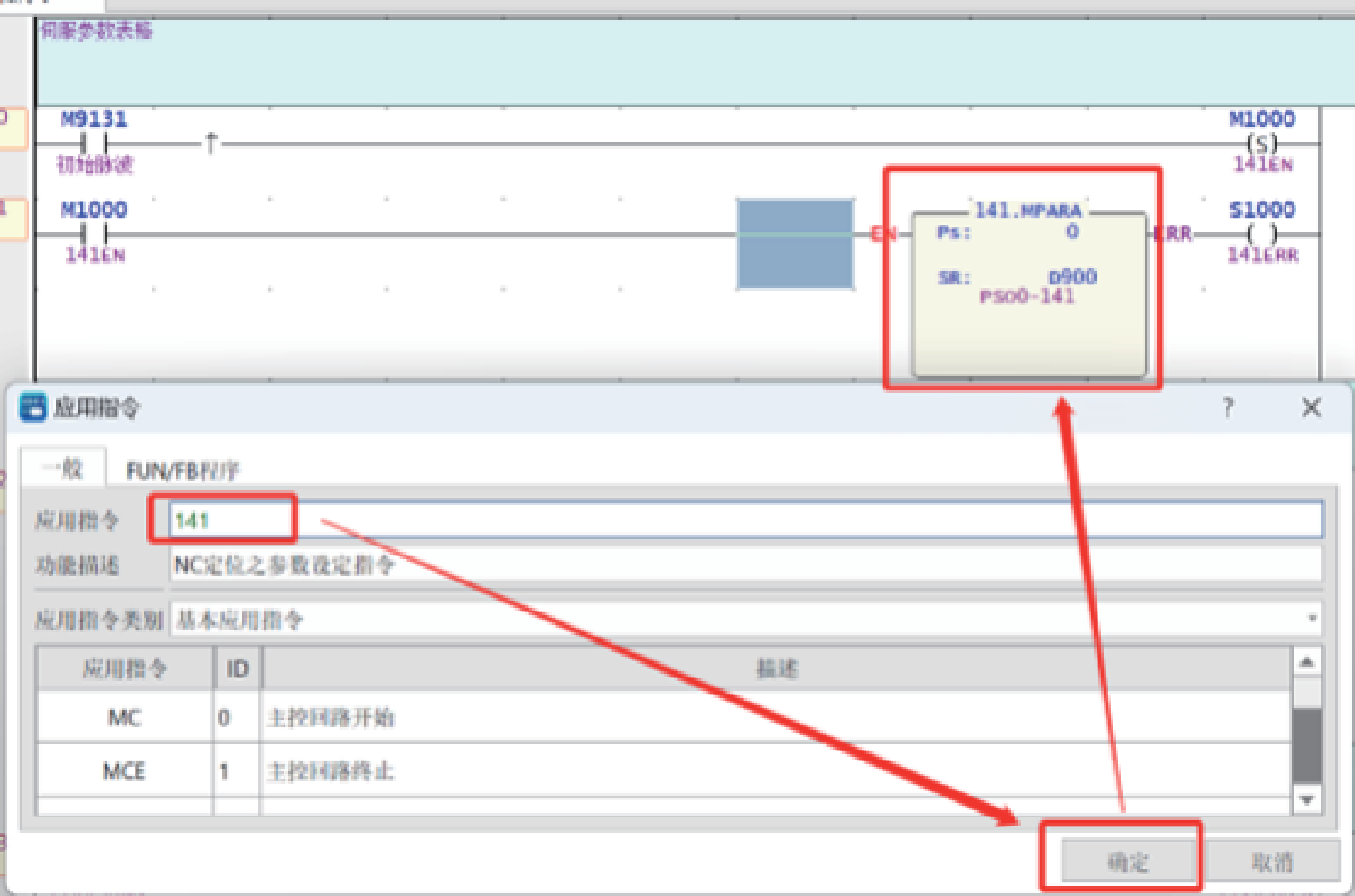 | ||
| ④創建伺服參數表格:按鍵盤“Z”創建表格-根據實際情況設定參數,比如最高速度、加減速時間、原點信號等,設置完成點擊確定。 | ||
 | ||
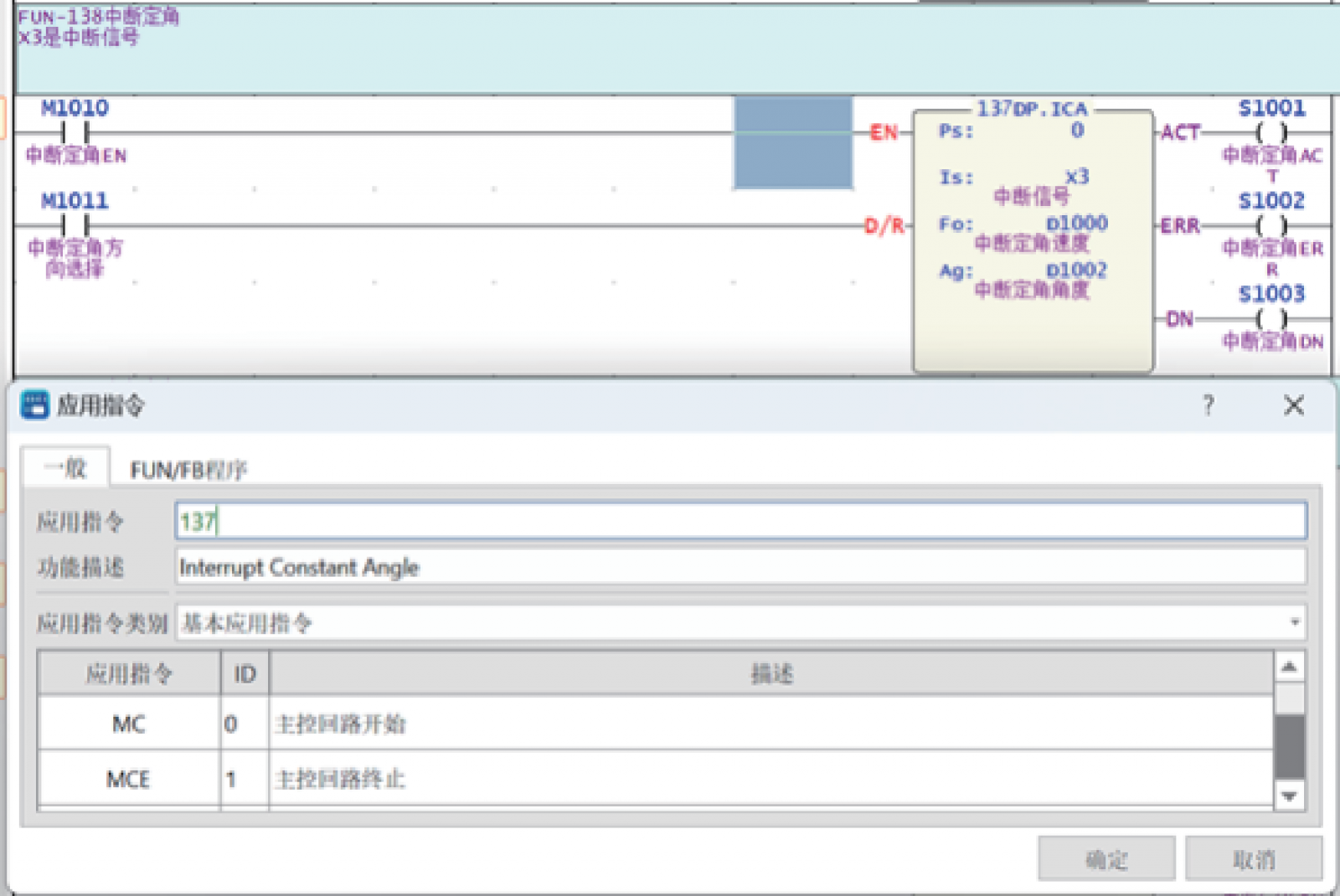
⑤新建中斷定角指令:按大寫“F”輸入137指令-點擊確認。 EN:執行控制信號 D/R:運轉方向(正轉/反轉切換) PS:控制軸號(0=Y0Y1高速脈沖輸出點) IS:中斷輸入點 FO:工作速度 AG:中斷時固定停止角度(單位0.01度,如設置6000=60.00度) 其每圈的脈沖由根據141指令的脈沖數/轉參數設定決定 | ||
 | ||
| ⑥新建中斷定長指令:按大寫“F”輸入138指令-點擊確認。 EN:執行控制信號 D/R:運轉方向(正轉/反轉切換) PS:控制軸號(0=Y0Y1高速脈沖輸出點) IS:中斷輸入點 FO:工作速度 Fd:中斷時固定輸出脈波數 | ||
 | ||
| 程式說明 |
| 階梯圖程序中當FUN137的EN信號導通后電機一直旋轉,當檢測到中斷信號后,電機運行到設定角度停止。注意此指令是以電機的原點為0度,當中斷信號輸入的時機不同時,電機的停止位置都是固定的,另外,如果中斷信號輸入的時機很靠近電機停止角度,電機無法在短時間內做減速停止,則會再多轉一圈后停在設定的角度上。 階梯圖程序中當FUN138的EN信號導通后電機一直旋轉,當檢測到中斷信號后,電機運行到設定設定距離后停止。注意如果中斷信號觸發的時機不同,電機最后的停止位置也不同,因為中斷觸發后電機運行的長度是固定的。 | ||